FMB unirobot 5P pro mit Messsystem FMB uniprove T4A
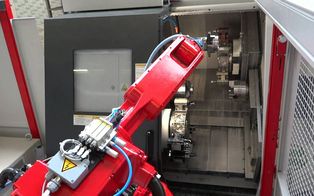
Automation einer Drehmaschine MIYANO BNE-51 SY6
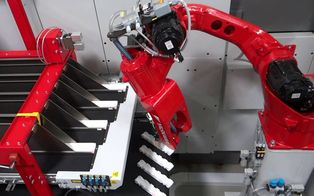
Automatisiertes Drehen von Gehäusen und Magnetrohren auf einer Drehmaschine MIYANO BNE-51 SY6 mit unserem Automationssystem FMB unirobot 5P pro. Be- und Entladen der Teile über einen 6-Achs-Industrieroboter FANUC M-10iA/12 mit 12 kg Traglast. Ein universelles Doppelgreifersystem übernimmt das Teilehandling. Die Teile werden auf Werkstückträgern zu- und abgeführt. Die Automationszelle wird vor der Drehmaschine positioniert.
Integriert in die Roboterzelle ist unser Messsystem FMB uniprove T4A zur automatischen Vermessung der Bauteile mit Messwertübergabe an die Werkzeugmaschine zur Werkzeugkorrektur.
Details Unirobot P pro
Details Uniprove