Entwicklung eines Be- und Entladesystems für eine 5-Achs-Fräsmaschine M ATSUURA MX-850. Es sollen 4 Typen großformatiger Druckgußwerkstücke (800 x 500 x 100 mm – 8 kg) auf eine hydraulische Spannvorrichtung be- und entladen werden. Nach der Bearbeitung müssen die Werkstücke abgeblasen werden.
Erstellung eines Konzepts, bei dem die Automatisierungszelle vor der Beladetür der Fräsmaschine aufgebaut wird. Über einen Umlaufförderer sollen die Werkstücke stehend in Werkstückträgern 800 x 500 mm der Automatisierungszelle zu- und abgeführt werden. Der Roboter erhält ein automatisches Greiferschnellwechselsystem, um die Rüstzeit bei der Typumstellung so gering wie möglich zu halten. Eine Bodenwanne mit Trittrosten fängt aus der Maschine verschleppten Kühlschmierstoff auf.

Roboterhersteller |
YASKAWA |
FANUC |
Roboterhandlinggewicht |
max. 50 kg |
max. 50 kg |
Roboterreichweite |
2061 mm |
2050 mm |
Aufbau |
Schutzzaunsystem |
Werkstückträgersystem |
Palettensystem |
Puffer |
Umlaufförderer für max. 10 Werkstückträger 800 x 500 mm |
Zuladung |
max. 50 kg pro Werkstückträger |
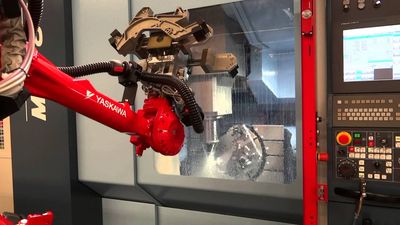
Automatisierte 5-Achs-Bearbeitung von Druckgussteilen auf einem Bearbeitungszentrum MATSUURA MX-850 mit unserem Automationssystem FMB unirobot WTUF pro. Be- und Entladen der Teile über einen 6-Achs-Industrieroboter YASKAWA MH50 mit 50 kg Traglast. Ein teilespezifisches Doppelgreifersystem übernimmt das Teilehandling. Die Teile werden über Werkstückträger auf einem Umlaufförderer zu- und abgeführt. Die Automationszelle wird vor dem Bearbeitungszentrum positioniert.
Das Be- und Entladesystem unirobot WTUF pro wird für die Automation einer 5-Achs-Fräsmaschine vom Typ MATSUURA MX-850 eingesetzt. Es ist mit einem modernen 6-Achs-Industrieroboter ausgestattet, der das Werkstückhandling mittels eines werkstückspezifischen Greifersystems übernimmt.
Der Roboter wird vor der Beladetür der Werkzeugmaschine auf einem Sockel montiert und verankert. Der Zugang zum Arbeitsraum der Werkzeugmaschine für Rüst- und Einstellarbeiten bleibt durch einen ausreichend großen Abstand des Roboters zur Werkzeugmaschine erhalten.
Unser Schutzzaunsystem uniprotect grenzt den Arbeitsbereich des Roboters sicher ab. Zwei Schiebetüren ermöglichen den Zugang zur Roboterzelle. Für die Zu- und Abführung der Werkstücke werden Werkstückträger im Format max. 800 x 500 mm eingesetzt. Die Werkstückträger werden über einen Umlaufförderer der Roboterzelle zu- und abgeführt. Der Umlaufförderer besteht aus zwei staufähigen Linearförderern sowie an deren Ende zwei Umsetzern für die Werkstückträger. Er ist für die Aufnahme von 10 Werkstückträger ausgelegt.
Zur Entnahme und zum Einlegen der Werkstücke in die Werkzeugmaschine wird am Roboter ein Doppelgreifer eingesetzt. Dieser ist an einem automatischen Schnellwechselsystem montiert und kann automatisch in einer Aufnahmevorrichtung abgelegt werden.
Die Bedienung und Programmierung aller Funktionen der Roboterzelle erfolgt über ein kompaktes anwenderfreundliches Programmierhandgerät mit Touchscreen.
Vorteile:
Große Zugangstüren und eine geneigte Anordnung des Roboters bieten gute Zugänglichkeit zur Werkzeugmaschine für eine Handbeschickung