


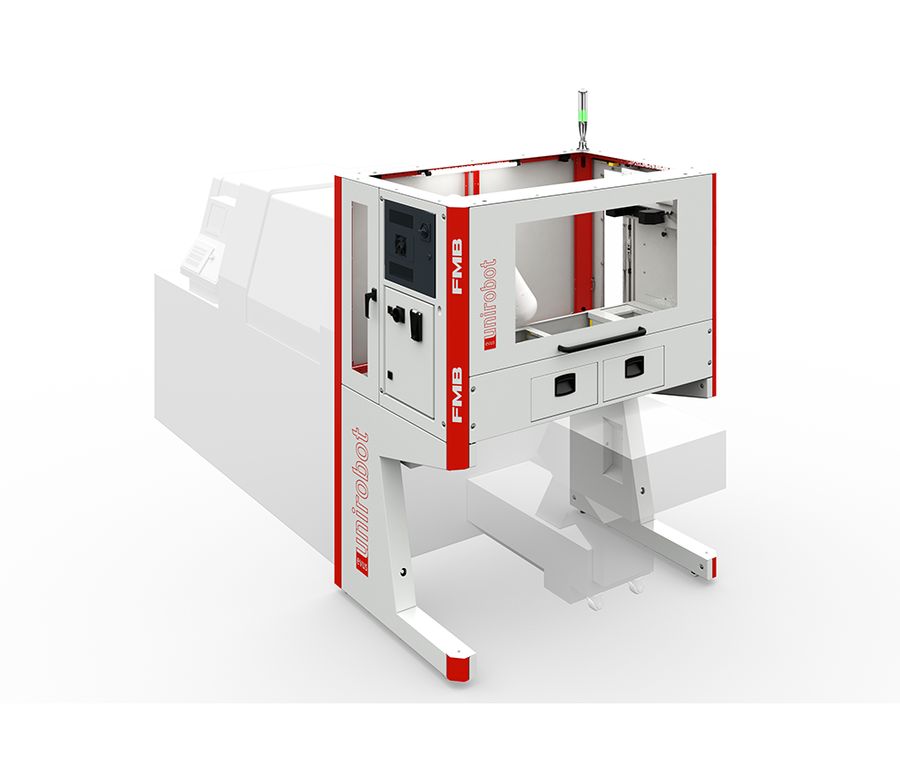
unirobot Evus - Flexibles Entladesystem für Langdrehautomaten
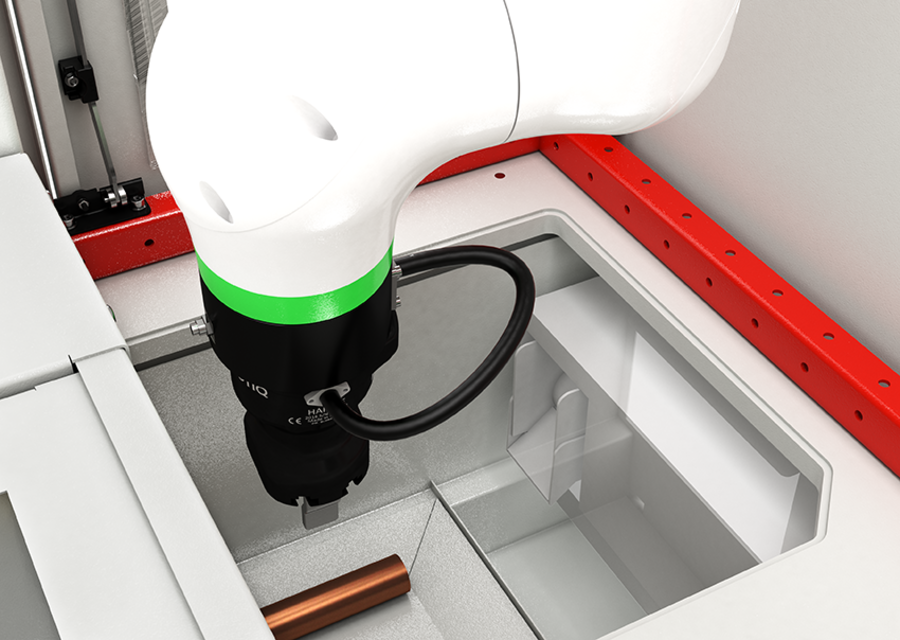
Die integrierte Kamera erkennt die Lage des Werkstücks und ermöglicht einen präzisen Griff des Roboters.

Schubladen ermöglichen das einfache und schnelle Wechseln der Werkstückträger.


Yaskawa GP7 |
Fanuc LRMate200iD7L |
Fanuc CRX-10iA |
|
Roboterhersteller |
YASKAWA |
FANUC |
FANUC |
Roboterhandlinggewicht |
max. 7 kg |
max. 7 kg |
max. 10 kg |
Roboterreichweite |
927 mm |
911 mm |
1249 mm |
Aufbau |
Überbau der Werkzeugmaschine |
Werkstückträgersystem |
Palettensystem |
Puffer |
Werkstückträger 1 Stück 600 x 400 mm / 2 Stück 400 x 300 mm |
Zuladung |
max. 50 kg pro Werkstückträger |
Die Automatisierung von Langdrehprozessen endet oft beim Ausschleusen der Werkstücke. Diese fallen in der Regel ungeordnet in Kisten, so dass eine nachfolgende Handhabung des Schüttguts in automatisierten Prozessen kompliziert wird. Um auch für diesen Teil der Produktion interessante Automatisierungslösungen bieten zu können, hat FMB den evus entwickelt. Das mobile Handlingsystem wird ohne Integrationsaufwand flexibel an Langdrehautomaten positioniert. Dort entnimmt und palettiert es oberflächenschonend die Werkstücke. Folgeprozesse und Zusatzfunktionen können problemlos individuell ergänzt werden.
Das Handlingsystem ist unabhängig vom Maschinentyp und benötigt keine Schnittstelle. Die Programmierung ist einfach, Werkstücke werden über die integrierte Kamera erkannt und mit einem flexiblen Werkstückgreifer gehandelt. Optional verbaute Rollen ermöglichen den einfachen Transport. So kann das Handlingsystem flexibel an verschiedenen Einsatzorten genutzt werden.
Ein verwindungssteifes Stahlgrundgestell bildet die Basis für alle Auf- und Einbauten in der Roboterzelle. Die Roboterzelle ist mit einer Schutzverkleidung versehen. Eine großzügige Öffnung ermöglicht den Zugang zu allen Komponenten des Handlingsystems. Das Handlingsystem ist für den Überbau des Späneförderers konzipiert und blockiert keine zusätzliche Produktionsfläche.
Für die Zu- und Abführung der Werkstücke werden Werkstückträger im Format 600 x 400 mm oder 400 x 300 mm eingesetzt.

